XCR-1:認識ロボット実験機XCR-1:XCR-1: An Experimental Cognitive Robot
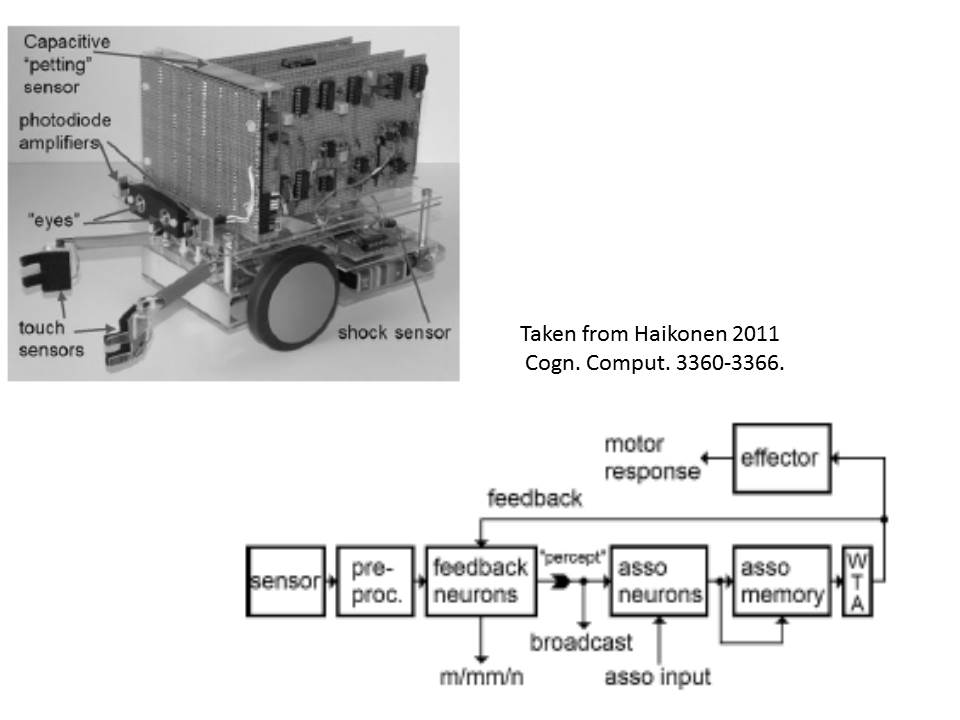
認識実験ロボットXCR-1は、小さな3輪ロボットで、複数のカメラによるカラー画像入力、マイクロフォン音声入力、取っ手による触覚入力の受容能力を持つ(Haikonen2011)。また、何かを認識するとそれに対応する言葉を発する独言機能を持っている。これは、ロボットの認識状態のモニターに使われる。
XCR-1は、マイクロプロセッサもどんな種類のプログラムも実装されておらず、ハイコネン式認識アーキテクチャ(Haikonen 2003)で結合された連想ニューロンネットワークのみで、象徴処理による認識能力を実現している。つまり、触覚入力による褒賞・懲罰信号と画像入力から得た物の色や形の違いを、連想によって結びつけることができる。これはパブロフの犬の実験と同様の条件付けが、XCR-1で可能であることを意味する。自然言語は象徴処理の一つ現れであるが、XCR-1は、簡単な会話と言葉の意味の学習実験に使うこともできる。XCR-1の能力は、専用の連想ニューロンチップが得られるようになれば、飛躍的に向上するだろう。
1) Haikonen PO. The cognitive approach to conscious machines. UK:Imprint Academic; 2003.
2) Haikonen, P.O. 2011, XCR-1: An Experimental Cognitive Robot Based on an Associative Neural Architecture, Cogn. Comput. 3360-3366.
科学はひとつ 宇宙物理学者による知的挑戦の記録
戎崎俊一 著
学而図書/四六判 並製320頁/本体2,400円+税
12年にわたり「戎崎の科学は一つ」で執筆されてきた記事を精選し、「地震と津波防災」など全9章に再編。すべての章に著者書き下ろしの解説を加えて集成した一冊。